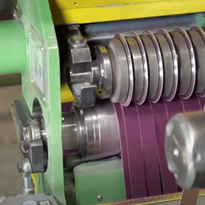
Although the process of precision machining is now largely automated due to advances in CNC technology, the final processes of deburring, linishing, polishing and grinding remain largely labour intensive.
The situation is similar in casting plants where runners and gates need to be removed from cast components, or surfaces need to be linished or blended to provide the desired form and/or surface finish.
Attempts to automate these finishing processes have often failed or been only partially successful due to the lack of “feel” and “response” which is traditionally provided by the human operator.
Recent developments in force compliant tooling systems have now opened the door for these processes to be fully automated, leading to lower production costs, improved productivity, less scrap and waste, higher consistency and greater workplace safety.
To remain competitive in both local and international markets, most manufacturers have embraced the technologies of high speed machining and automation in the production of precision machined components. In many cases, this has led to 24/7 operations where much machining can be conducted in a partial, or completely, unmanned environment.
However, when it comes to the finishing of these components you will often see groups of workers toiling away with hand operated tools to remove burrs and flash, or polishing and grinding to obtain the specified final surface finish. Due to the high manual content and typically dirty environment, these are costly and difficult processes to control. Often, it is difficult to even find workers that are capable or willing to do this kind of task where high staff turnover is the norm.
Compliant tooling technologies enable these process to be automated, in some cases whilst still in the machine tool, and in other cases by robot. For instance, the Speedeburr range of edge deburring tools has models available for both CNC’c and robots. These pneumatically driven deburring tools have a floating head for axial compliance which assist in eliminating chamfer inconsistencies due to part tolerances and chatter.
Air pressure is used to drive the cutting tool and also to provide the axial force via a free floating piston (FFP). The FFP ensures the cutting burr hugs the workpiece edge with a constant force and provides quality chamfers at speeds up to 300mm/sec.
The high speed, radially compliant Flexdeburr units from ATI-Industrial Automation are also air driven and come in a range of sizes between 150 to 660 Watts to effectively remove parting lines and flash. The patented design provides a pneumatically adjusted cutting force which can be changed on command throughout the process and built-in compliance reduces robot programming.
Flexdeburr enables uniform quality at high feed rates as the cutting burr can compensate for surface irregularities with up to +/- 9mm of compensation. Suitable for use with aluminum, steel and plastic parts, these units incorporate quiet 30,000 to 65,000 rpm turbine motors and have mounting options to suit all robots.
ATI’s robotic force and torque sensor systems have also teamed up with a purpose built polishing tool to enable robotic polishing of stainless steel metal products at one Sydney manufacturer. The F/T system captures strain gauge data from the sensor which is then converted to force and torque values. The F/T system allows for the monitoring of up to six axes ( 3 x force and 3 x torque) and provides this information to the robot controller which in turn uses the data in real time to provide constant and controlled polishing pressure.
Force and torque sensors are available in sizes to suit all robots and can be specified with connection to a data acquisition (DAQ) card which makes it easy to read the data from a PC or the robot controller. Alternatively systems can output serial and analogue force/torque data.
When confronted with medium to heavy duty grinding, polishing and other robotic material removal work, PushCorp Inc’s patented active force controller makes the end-of-arm tooling as good or better than what can be done by a person. It can control contact between the material removal tool and the product. Basically, with control of both media speed and force, robots can perform consistently high quality material removal operations.
PushCorp, the world leader in force control technology, offers both passive and active force control compliance devices. The active force instruments maintain the applied force of the material removal tool. Should any variation in the force be sensed by the system, it will adjust accordingly. This device is capable of compensating for acceleration and gravity for a given force applied to the surface of the piece being worked. This facilitates the use of higher tool speeds, particularly when the surface has an irregular shape or profile.
Some examples of recent PushCorp applications include;
• ATM machines remove weld spatter and blend weld beads.
• Car windows grinds smooth round edge on auto glass profiles
• Alloy wheels blend and smooth complex surfaces prior to chrome plating
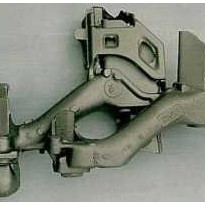
• Cylinder heads deburring with high speed die grinder
• Car spoilers remove edge flashing on plastic spoilers prior to painting
• Tyre moulds deep drilling of over 200 gating holes in tyre moulds
• Castings Cut-off saw trims castings to size.
• Car bodies wet sanding car bodies at final assembly to eliminate “orange peel” and other surface defects.
The PushCorp range of products includes compliance units and controllers, high speed servo tool changers, servo weld shavers and glass grinders, plus active compliance wet sanders to enable complete robot end-of-arm system solutions. In addition there are system support products such as servo back stands with pneumatic belt tensioning and storage units for managing up to thirty (30) sanding discs for continuous operation.
When combined with automatic quick tool change systems, robots can be set-up with a series of compliant tools to accurately and efficiently finish any job.













-205x205.jpg)